NEDO次世代人工知能・ロボット中核技術開発プロジェクト
注:左にソフトウェアのダウンロードサイトへのリンクがあるメニューが表示されない場合は、左上の三本線をクリックしてメニューを表示させてください。
本ページは、NEDO次世代人工知能・ロボット中核技術開発プロジェクトにおける産業用ロボットカテゴリーの成果を掲載しています。
近年の消費者ニーズの多様化に伴う生産工程の複雑化(多品種少量生産、特注品生産など)により、ロボットにも複雑な作業に対応することが期待されています。従来のロボットは、溶接や搬送など単一の工程を担うことが主流でしたが、現在では、1台のロボットが部品供給から製品組み立てまでの全工程を一手に担うケースも増えています。一方で、部品供給や製品組み立て作業のロボット化にはロボット動作の事前設計に膨大な時間や手間を要するため、その効率化が求められていました。またロボット導入後も、ロボットの視覚情報に基づく作業計画の策定に長い時間を要してしまい、ロボット利用の大きな課題となっていました。
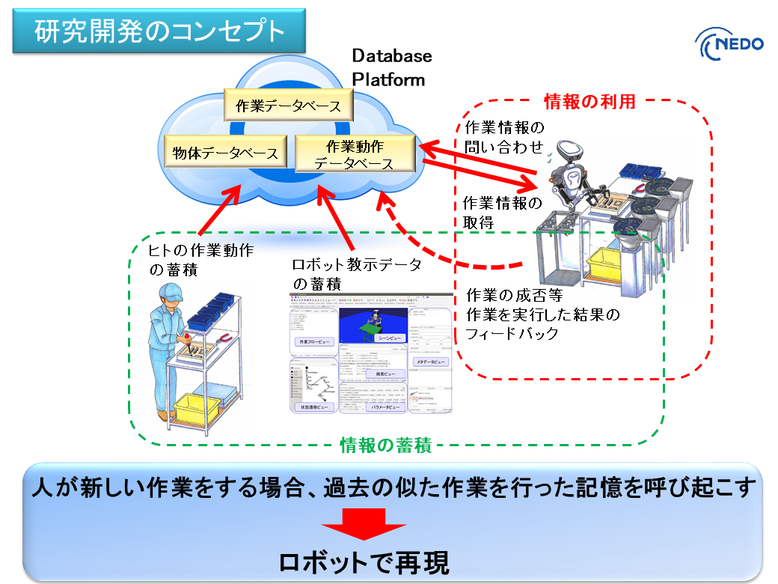
ここで、ヒトが行ってきた作業をロボットによって代替することを考えます(下図)。本プロジェクトでは、特に部品供給作業と製品組立作業を題材として挙げています。ヒトは非常に器用に手作業をこなすため、これをロボットで代替しようとすると、新たな作業への適用や多様な作業の実現が非常に困難となります。ヒトは新しい作業を行う場合、過去に行った類似した作業のことを思い出し、この類似した作業のコツを利用することで新しい作業を行っていると考えられます。このような、ヒトのメカニズムに習い、本プロジェクトではヒトの作業動作や教示ツールで得られた作業動作をデータベースに蓄積させ、ロボットが必要に応じてダウンロードする枠組みを考えました。ここでは、このフレームワークに含まれる、いくつかの主要なツールを公開しています。