動作教示ソフトウェア
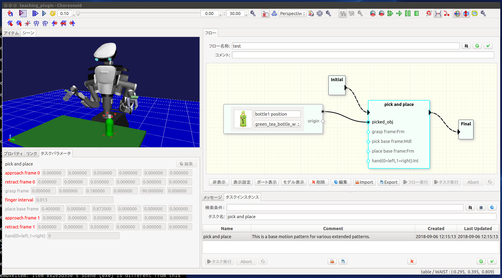
teachingPluginはロボットの教示ソフトウェアの一種です。あらかじめ設計されたロボットの動作パターンを組合わせることで、より長い作業手順を記述します。3Dモデルを動作パターンに紐付けることで、3Dモデルの位置や3Dモデル上に定義した座標系を利用して動作パターンを調整することができます。また、3Dモデルに加えて画像やテキスト等のデータも合わせて利用することで、ユーザが動作パターンの目的を理解し、再利用しやすい形でのデータ管理を可能とします。
本ソフトウェアは、産総研で開発されたロボット用統合GUIソフトウェアであるChoreonoidのプラグインとして動作します。